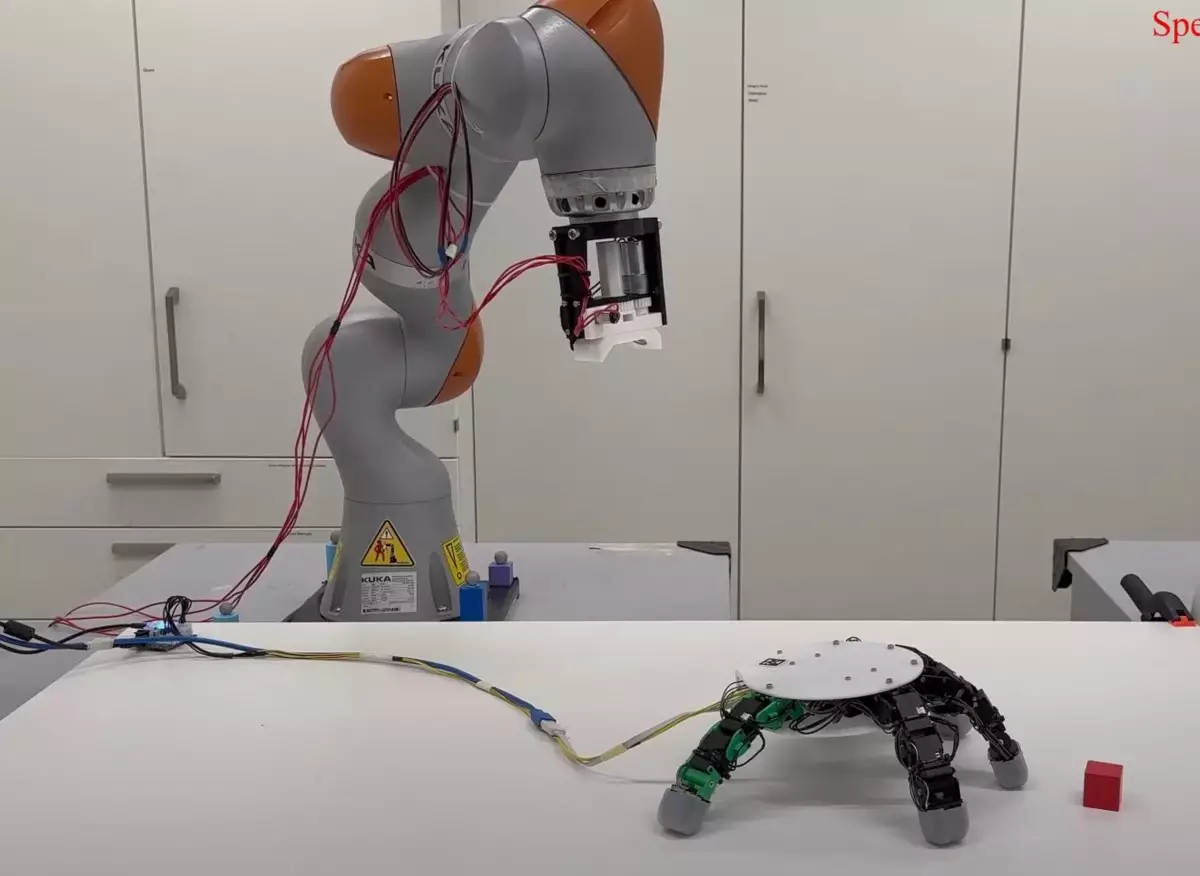
Recent advancements in robotics have challenged conventional designs and encouraged innovative thinking. One of the most fascinating examples is the research video titled “Beyond Manual Dexterity,” which debuted alongside a groundbreaking paper at the IEEE International Conference on Robotics and Automation in Rotterdam. Developed by the École Polytechnique Fédérale de Lausanne (EPFL) in Switzerland, this project showcases the potential of robotic hands to perform complex tasks with a level of dexterity that is currently unparalleled. Unlike typical research presentations, which often adhere to existing paradigms, this video captivates viewers from the outset, presenting a highly agile robotic gripper that effectively sets the stage for what follows.
The research focuses on enhancing the capabilities of multi-fingered robotic grasping techniques through deep learning models. This innovative approach aims to enable robotic hands to manipulate a more extensive array of objects in cluttered environments. The researchers assert that while significant strides have been made in this domain, there are still uncharted territories, particularly regarding contact information-guided grasping. This highlights an intriguing gap: although roboticists have long drawn inspiration from nature, the application of these principles does not always encompass the full scope of possible innovations.
For years, robotic design has largely mimicked biological organisms, leading to a proliferation of models inspired by quadrupeds and humanoids. However, the team’s work in “Beyond Manual Dexterity” ventures into untested waters by daring to challenge these biological limitations. By rethinking the form and function of robotic hands, the researchers effectively break free from previous constraints, suggesting that innovation can arise from embracing the uncanny or the unconventional. This departure from the norm raises essential questions about the nature of design in robotics—specifically, why should robotic hands emulate human anatomy? By moving beyond such constraints, the potential applications for robotics expand dramatically.
While the concept of a highly adaptive robotic hand that bends and navigates environments with unprecedented fluidity is alluring, it also risks straddling the line of unease known as the “uncanny valley.” Specifically, a design that mirrors a human hand too closely yet exhibits abnormal movements can evoke discomfort. This unsettling aspect becomes evident as robots evolve into forms that challenge our perceptions. Researcher Xiao Gao, while acknowledging the horror-movie trope associated with such technology, boldly claims this project may represent the first instance of introducing these pioneering concepts into robotics.
As the field of robotics continues to evolve, the findings presented by the EPFL team provoke thought about the future landscape of robotic technology. Can we overcome the visceral reactions prompted by unsettling designs to realize their full potential? While questions remain about scalability and practical application, the research undoubtedly lights a spark of curiosity within the community. The shift from biologically inspired robots to arguably even “horror bots” signifies a major transition, paving the way for innovation that harnesses our ever-expanding understanding of robotics. Ultimately, this work opens the door not only to new ideas but also raises ethical and aesthetic considerations that warrant further exploration in the dynamic realm of advanced robotics.